Врезанный шарнир: Построение эпюр в балке с шарниром
Построение эпюр в балке с шарниром
Задача 1. Построить эпюры Q и M в балке с шарниром.
1. Определим опорные реакции. Для определения опорных реакций используем свойство шарнира – момент в нем как от левых, так и от правых сил равен 0.
Если рассмотреть левую часть, то в уравнении будут присутствовать две неизвестные RА и МА. Значит, следует рассмотреть правую часть (из него найдем RВ).
Теперь из него найдем МА
Следующее уравнение из него найдем RА
2. Строим эпюру Q.
Участок первый — АС, смотрим левую часть
Участок второй — СВ, смотрим правую часть
3. Строим эпюру М
Строим эпюру М
Определим момент в точке, где Q=0 (момент имеет экстремум), это момент в точке К, т.е. МК , для этого определим положение точки К.
Это уравнение первого участка, на котором находится точка К
в точке К
Строим эпюры. Задача решена.
Задача 2. Построить эпюры Q и M в балке с шарниром.
1. Определим опорные реакции. Для определения опорных реакций используем свойство шарнира – момент в нем как от левых, так и от правых сил равен 0.
Если рассмотреть правую часть, то в уравнении будут присутствовать две неизвестные Rд и Rв. Значит, следует рассмотреть левую часть.
Знак «-» говорит о том, что реакция RВ направлена в обратную сторону.
Проверка:
2. Построение эпюры Q.
Участок первый — ЕА, смотрим левую часть
Участок второй — АС, смотрим левую часть
Участок третий — СВ, смотрим левую часть
Участок четвертый — ВД, смотрим правую часть
3. Построение эпюры М
Т.к. точки экстремума на эп.Q не наблюдается, определяем изгибающий момент в середине участка ВД
Строим эпюры, задача решена.
1.3 Для балки с врезанным шарниром требуется:
1
Определить опорные реакции;
2
Построить эпюры Qy,
Mx;
3
Подобрать по Mmax
размеры кольцевого сечения.
Исходные
данные:
[σ] = 160 МПа, α
= d
/ D
= 0.8.
Дано:
Балка с врезанным шарниром; L
= 1 м; M
= 30 кН*м; q=
40 кН/м; F
= 50 кН (см. приложение В).
1 Определение опорных реакций
В
данной задаче балка закреплена при
помощи трех опор – шарнирно-неподвижной
и двух шарнирно-подвижных, а также в ней
присутствует врезанный шарнир.
Следовательно, данную балку можно
разбить на две составляющие – основную
и подвесную. Основной будет балка AD,
а подвесной – балка DC
(см. приложение В). При этом в подвесной
балке в точке D
шарнир следует рассмотреть как
шарнирно-неподвижную опору. Найдя ее
вертикальную реакцию RD,
следует перенести ее в точку D
основной балки. В этой точке будет
действовать та же сила RD’,
равная по величине реакции RD,
но действующая в противоположном
направлении.
Рассмотрим
для начала подвесную балку. Для этого
Для этого
составим уравнения равновесия, определив
из них значения опорных реакций. При
этом из расчетной схемы балки видно,
что реакция HD
= 0,
так как на балку не действует ни одна
продольная сила.
ΣMD
= 0: –
M
+ RC*3L
= 0
Отсюда
RC
= M/(3*L)
= 30/(3*1) = 10
кН
ΣMC
= 0: —
M
— F*3L
+ RD*3L
= 0
Отсюда
RD
= (M
+ F*3L)
/3L
= (30
+ 50*3*1) /(3*1) = 60
кН
Теперь
рассмотрим основную балку. Для этого
также составим уравнения равновесия,
определив из них значения опорных
реакций. При этом из расчетной схемы
балки видно, что реакция HB
= 0,
так как на балку не действует ни одна
продольная сила.
ΣMA
= 0: — q*3L*1.5L
– RD’*3L
— F*3L + RB*L
= 0
Отсюда
RB
= (q*3L*1.5L
+ RD’*3L
+ F*3L) /L
= 40*3*1.5
+ 60*3 + 50*3) = + 510
кН
ΣMB
= 0: — q*3L*0.5L
– RD’*2L
— F*2L — RA*L
= 0
Отсюда
RA
= — (q*3L*0.5L
+ RD’*2L
+
F*2L) / L = — (40*3*0.5
+ 60*2 + 50*2) = — 280
кН
Положительные
значения свидетельствуют о том, что
первоначальное направление реакций
выбрано верно. Отрицательные означают,
что необходимо поменять первоначально
выбранное направление данной реакции
на противоположное.
2 Построение эпюр Qy, Mx
Теперь
можно переходить к рассмотрению каждой
из составных частей балки. Необходимо
будет сделать разрезы в каждой из них.
Затем, отбросив одну из частей, заменить
ее действие соответствующим изгибающим
моментом Mx
и поперечной силой Qy
– разумеется, следуя общепринятому
правилу знаков.
Итак,
рассмотрим каждый из участков – всего
их будет 3
(см. приложение В), и составим уравнения
поперечных сил и изгибающих моментов
на каждом из них:
I
участок:
0 ≤ z1
≤
3L
Qy(z1)
= — RC
= —
10 кН
=
const
Mx(z1)
= — M
+ RC*z1
(линейное
уравнение)
Тогда
Mx(z1
= 0) = —
30+
10*0 = —
30
кНм
Mx(z1
= 3L
= 3) = —
30+
10*3 = 0
II
участок: 0 ≤ z2
≤
L
Qy(z2)
= — RA
— q*z2
(линейное
уравнение)
Тогда
Qy
(z2
= 0) = – 280 – 40*0 = — 280 кН
Qy
(z2
= L
= 1) = – 280 – 40*1 = — 320 кН
Mx(z2)
= — RA*z2
—
(квадратное уравнение)
Тогда
Mx(z2
= 0) = -280*0 —
= 0
Mx(z2
= L
= 1) = -280*1 —
= -300
кНм
III
участок: 0 ≤ z3
≤
2L
Qy(z3)
= — RA
– q*(z3
+ 1) + RB
(линейное
уравнение)
Тогда
Qy
(z3
= 0) = — 280 – 40*(0+ 1) + 510
=
190 кН
Qy
(z3
= 2L
= 2) = — 280 – 40*(2 + 1) + 510
=
110 кН
Mx(z3)
= — RA*(z3
+ 1) + RB*z3
– q*(квадратное
уравнение)
Тогда
Mx(z3
= 0) = — 280*(0 + 1) + 510*0 – 40*=
— 300 кНм
Mx(z3
= 2L
= 2) = — 280*(2 + 1) + 510*2 – 40*=
0
По
полученным значениям строятся
соответственно эпюры Qy
и Mx
(см.
приложение В).
Шарнир. Разновидности и принцип шарнирного соединения
Шарнир – кинематическая пара вращательного типа, одно звено которой может поворачиваться относительно другого.
Рис. 1 Шарнир цилиндрического типа
Наиболее распространенным примером шарнирного соединения являются дверные петли.
Главным свойством шарнира, используемым в механике, является то, что соединенные им части конструкции имеют возможность углового перемещения. При этом необходимо помнить, что в отличие от силы, момент от одной части конструкции к другой, через шарнир не передается.
Изображение шарнирных соединений
Рис. 2 Шарнирное соединение трех стержней
На чертежах и расчетных схемах шарниры изображаются в виде окружности малого диаметра соединяющей две или более части конструкции (рис. 2) либо примыкающей к одной из них (рис. 3).
Рис. 3 Шарнирное соединение двух стержней
Особое внимание следует уделять изображению шарнира в расчетных схемах задач на изгиб. Шарнир, наложенный на линию балки (рис. 4) подразумевает, что здесь две или более отдельных частей балки соединены шарниром, при этом как отмечалось выше, изгибающий момент через данное соединение не передается.
Шарнир, наложенный на линию балки (рис. 4) подразумевает, что здесь две или более отдельных частей балки соединены шарниром, при этом как отмечалось выше, изгибающий момент через данное соединение не передается.
Шарнир, примыкающий к линии балки (рис. 5), говорит о том, что в данном случае балка является сплошной и просто соединена шарниром с другими элементами.
Рис. 5 Фрагмент балки с шарнирной опорой
Классификация шарниров
По способу возможного взаимного перемещения частей шарнира различают:
- Цилиндрический – поворот осуществляется относительно общей оси звеньев шарнира.
- Шаровой – поворот возможен относительно общей точки.
- Карданное соединение – комбинация последовательно соединенных цилиндрических шарниров, оси которых пересекаются.
Пример расчета реакций в шарнирах >
Схематизация связей в узлах соединений расчетных схем
Схематизация
систем связана с использованием таких понятий, как диск, степень свободы системы
и степень её изменяемости.
Диск – любая
неизменяемая система или неизменяемая часть системы.
Иными
словами к диску можно отнести: отдельный элемент, составляющий плоскую систему
(простой диск) – например, стержень или брус; целую неизменяемую плоскую
систему или её неизменяемую часть (укрупненный диск) – например, ферму;
неизменяемое основание и землю.
Точку
можно рассматривать как диск весьма малых размеров. Степень свободы диска,
стягивающегося в точку, равна двум.
Земля
(или основание – тело, на которое опирается система в целом) принимается за
диск весьма больших размеров, а степень свободы её условно считают равной нулю
(условно считают неподвижной).
Любой диск принято изображать
плоской фигурой произвольного очертания.
Свойство
дуализма диска и связи: в системе один и тот же элемент по желанию расчетчика может быть принят и
за диск, и за связь; (здесь не допускается
учитывать один и тот же элемент системы дважды или не учитывать его вовсе).
Так условно различают связи между телами и опорные связи, хотя любое основание, на которое опирается расчетная схема, также является диском, но бесконечно большого размера.
Степень свободы
системы
– число независимых геометрических параметров, определяющих положение тела на плоскости или в пространственаименьшее число геометрических параметров (число обобщенных координат – координат
точек, углов наклона элементов системы, их длины, которые могут независимо
друг от друга изменяться при движении системы относительно земли, которое
определяет и возможные движения диска).
Свободное тело — тело, движению
которого в пространстве не препятствуют какие-либо закрепления и не соприкасающееся с другими телами.
Свободный диск при его
плоском движении относительно земли (плоское тело) имеет три степени свободы, что
соответствует и его трем возможным движениям: двум поступательным по
направлениям, параллельным осям координат х и у плоскости движения диска и
вращательному движению вокруг оси перпендикулярной плоскости движения диска.
Свободное пространственное
тело имеет шесть степеней свободы перемещений – возможность поступательных движений по трем направлениям вдоль трех взаимно перпендикулярных осей и трех
вращательных движений вокруг тех же осей.
Положение любой точки в пространстве может быть определено тремя координатами (три степени свободы), на плоскости — двумя координатами (две степени свободы).
Степень
(число) изменяемости системы — чиcло cтепеней cвободы cиcтемы.
Cиcтемы c одной cтепенью
изменяемоcти называютcя механизмами.
Системы c
неcколькими cтепенями изменяемоcти — кинематичеcкими цепями.
Cиcтемы c нyлевой cтепенью
изменяемоcти называютcя cтатичеcки
опpеделимыми.
Cиcтемы c отрицательной cтепенью
изменяемоcти называютcя cтатичеcки
неопpеделимыми.
Реальные
cиcтемы сооружений должны быть неизменяемыми, т.е. обладать нyлевой или
отpицательной cтепенью изменяемоcти.
Образование систем из отдельных
дисков производится при помощи связей, описывающих запрещенные движения дисков
относительно друг друга.
Одна кинематическая связь – устройство, ограничивающее одну степень
свободы (ограничивающее перемещение по одному из шести направлений) диска.
Каждая связь имеет кинематическую и статическую (силовую) характеристику.
Кинематическая характеристика
определяет, каким движениям одного диска относительно другого препятствует
связь и сколько степеней свободы она уничтожает.
Статическая характеристика связи
определяет, какие реакции в ней могут возникнуть. (какие реакции и в каком количестве необходимо приложить к твердому телу при удалении связей между телами).
Связи
обычно представляют в виде опорного стержня или опорных стержней, соединяющих
тело с опорной поверхностью.
Опорные стержни – это
условные (существующие только на расчетной схеме, но моделирующие
действительное взаимодействие тел) абсолютно жесткие (что исключает возможность
перемещения системы по направлению оси стержня и вызывает возникновение в этом
направлении опорной реакции), весьма длинные по сравнению с возможными
перемещениями стержни (поэтому при повороте стержня вокруг оси нижнего
неподвижного шарнира дуга окружности, описываемая верхним шарниром, может быть
принята за прямую, перпендикулярную к оси стержня), соединенные с блоками
системы идеальными шарнирами. Каждый опорный стержень отнимает у блока одну
Каждый опорный стержень отнимает у блока одну
степень свободы.
В реальных конструкциях связями являются
болты, заклепки, сварные швы, анкерные болты, врубки, замоноличенные стыки ж.б.
конструкций и т.п.
Связи разделяют
на внешние и внутренние.
Внешние связи — связи,
служащие для неподвижного прикрепления системы к основанию.
Внутренние связи — связи,
которые входят в структуру самой системы и служат для соединения между собой
элементов системы или отдельных неизменяемых её частей.
Связи могут быть жесткие
(неподатливые) и упругие (податливые).
Жесткие
(неподатливые) связи – связи, в которых перемещения по направлению
опорных реакций принимаются равными нулю, моделируются опорными стержнями или
жесткими заделками.
В действительности жесткие
связи обладают той или иной податливостью.
Упругие
(податливые) связи (связи
конечной жесткости) – связи, которые не отнимают степеней свободы, но создают
реакции, пропорциональные перемещениям точки присоединения этой связи в
направлении этой связи.
Упругие связи допускают
конечные смещения вдоль упругой связи.
В кинематическом анализе эти
связи рассматривают как жесткие, однако, если они приводят к возникновению
значительных перемещений, то расчет следует вести по деформированной (т.е.
нелинейной) схеме.
С помощью упругих связей
моделируют, например, упругое (податливое) основание.
Также
разделяют односторонние (неудерживающие) связи и двусторонние (удерживающие)
связи:
Односторонняя
(неудерживающая) связь – связь, которая может воспринимать усилие
только в одном направлении.
Такая связь допускает
перемещения объекта, в результате которых объект освобождается от связи.
Такие связи могут явиться
причиной нелинейности системы, если действующие нагрузки знакопеременны.
Например, колесо, опертое на
рельс, ввиду того что контакт может передавать усилие только в одном направлении
или канатная оттяжка, ввиду того, что она может воспринимать только
растягивающие усилия, а при сжатии теряет свою форму.
Двусторонняя
связь – связь, которая воспринимает нагрузки любого знака и ограничивает
перемещения в обоих направлениях.
Такая связь не допускает
перемещения объекта, в результате которых объект освобождается от связи.
Связи могут быть
идеальными и реальными.
Примеры
идеальных связей: внутренние связи в абсолютно твердых телах; абсолютно гладкие
поверхности; шарниры без трения; нерастяжимые нити; закрепленные точки; качение
без скольжения.
Примеры реальных
связей: шероховатая поверхность; шарниры с трением; упругие растяжимые нити;
пружины; качение с проскальзыванием.
Замечание:
всякую реальную связь можно сделать идеальной.
Связи могут быть
простыми и сложными.
Простые
связи – связи, соединяющие между собой два диска.
Сложные
связи образуются при соединении шарниром или жесткой связью более двух дисков.
Виды простых
связей плоских систем:
Три основных
вида связей, применяемых при образовании неизменяемых плоских систем:
1 Связь первого вида – стержень с шарнирами на концах (простая линейная связь) (опорный стержень), указывающий линию действия реакции связи:
Связь первого вида (стержень с шарнирами на концах)
Кинематическая
характеристика:
эта
связь препятствует поступательному перемещению одного диска относительно
другого по направлению связующего стержня (оси связи).
Следовательно,
такая связь уменьшает степень свободы системы на единицу (уничтожает одну
степень свободы взаимного перемещения дисков).
Статическая характеристика:
в
такой связи может возникнуть реактивная сила, направленная вдоль стержня.
(Действие удаленной связи заменяется реакцией, направленной вдоль оси связи)
2 Связь второго вида – простой одиночный врезанный цилиндрический шарнир:
Связь второго вида (Простой
одиночный врезанный цилиндрический шарнир)
Кинематическая характеристика:
простой
одиночный врезанный цилиндрический шарнир препятствует поступательным
перемещениям одного диска относительно другого по горизонтальному и
вертикальному направлениям и допускает поворот одного диска относительно
другого. (Шарнирные узлы обеспечивают равенство только линейных перемещений
соединяемых концов стержней, но разрешают независимый свободный поворот каждого стержня на свой
угол поворота. )
)
Следовательно,
такая связь уничтожает две степени свободы взаимного перемещения дисков
(уменьшает степень свободы системы на две единицы): поэтому в кинематическом
смысле простой одиночный врезанный цилиндрический шарнир эквивалентен двум
стержням с шарнирами на концах (двум связям первого вида), сходящимися в точке соединения дисков. (При деформации
упругой линейно-деформируемой плоской стержневой системы в плоскости любой
шарнирный узел имеет две степени свободы упругих перемещений.)
Статическая
характеристика:
При действии сил на соединяемые
диски в связующем шарнире возникает реактивная сила R
(реакция шарнира), которая проходит через его центр и может иметь любое
направление, в следствие чего может быть разложена на две составляющие по взаимно-перпендикулярным направлениям – например, по горизонтальному и вертикальному.
*Если два диска соединены двумя связями первого вида, оси которых пересекаются за пределами соединения, точка их пересечения называется фиктивным шарниром. В этом случае при удалении связей их действие заменяется двумя линейными реакциями R1 и R2.
В этом случае при удалении связей их действие заменяется двумя линейными реакциями R1 и R2.
Фиктивный шарнир
3 Связь третьего вида – простая жесткая связь.
Связь третьего вида (Простая жесткая связь)
Кинематическая характеристика:
Жесткая заделка (например, замоноличивание
стыковых соединений, сварка и т.д.) препятствует всем трем взаимным
перемещениям соединяемых дисков, т.е. не допускает как относительных поступательных перемещений
дисков по горизонтальному и вертикальному направлениям, так и повороту одного
диска относительного другого.
Следовательно, такая связь уменьшает
степень свободы системы на три единицы (уничтожает три степени свободы
взаимного перемещения дисков): поэтому простая жесткая связь кинематически
эквивалентна трем не параллельным и не сходящимся в одной точке стержням с шарнирами на концах (трем связям первого вида) или
одной связи первого вида и одной связи второго вида. (При деформации плоской стержневой системы в плоскости любой
(При деформации плоской стержневой системы в плоскости любой
её жесткий узел имеет три степени свободы упругих перемещений.)
Простая
жесткая связь образует неподвижное относительно друг друга соединение двух
дисков (соединяет два диска в один более крупный). (Жесткие узлы соединяют
подходящие к нему концевые сечения элементов (например, поперечные сечения
стержней) так, что обеспечивают
одинаковость линейных и угловых перемещений этих сечений в плоскости, в
которой находится стержневая система.)
Статическая
характеристика:
При
действии сил на диски, соединяемые жесткой связью, в такой связи могут
возникать: реактивная сила любого направления, проходящая через любую её точку,
и реактивный момент (пара сил) относительно этой точки, иными словами – две силы взаимо-перпендикулярных направлений (обычно реактивную силу раскладывают по горизонтальному и вертикальному
направлениям) и момент относительно точки их пересечения (или тремя реакциями, линии действия которых не сходятся в одной точке).
Виды сложных связей плоских систем:
Сложная
связь (шарнирная или жесткая), соединяющая m
дисков, эквивалентна m-1
соответствующим простым (шарнирным или жестким) связям.
Сложные
(кратные) шарниры – шарниры, связывающие между собой более двух дисков.
Сложные
(кратные) шарниры можно рассматривать
как ряд простых шарниров, насаженных на общую ось, причем движение
дисков вдоль оси исключается.
Различают
полные и неполные сложные (кратные) шарниры.
Полный
сложный шарнир – сложный шарнир связывает между собой больше двух дисков, все
соединяемые стержни которым сходятся в одном узле.
Сложный
шарнир эквивалентен (n-1) одиночным шарнирам, где n — число дисков, входящих в
узел.
Пример полного
сложного шарнира
Неполный
сложный шарнир
– сложный шарнир, некоторые из сходящихся в узле соединяемых им стержней
соединены жестко, а остальные прикреплены к узлу с помощью шарнира.
Пример неполного
сложного шарнира – одиночный приставной шарнир.
О видах связей в пространственных системах написано здесь
Рекомендую к приобретению и прочтению: В.В. Бабанов_Строительная механика_2012
Не удается найти страницу | Autodesk Knowledge Network
(* {{l10n_strings.REQUIRED_FIELD}})
{{l10n_strings.CREATE_NEW_COLLECTION}}*
{{l10n_strings.ADD_COLLECTION_DESCRIPTION}}
{{l10n_strings.COLLECTION_DESCRIPTION}}
{{addToCollection.description.length}}/500
{{l10n_strings.TAGS}}
{{$item}}
{{l10n_strings.PRODUCTS}}
{{l10n_strings. DRAG_TEXT}}
DRAG_TEXT}}
{{l10n_strings.DRAG_TEXT_HELP}}
{{l10n_strings.LANGUAGE}}
{{$select.selected.display}}
{{article.content_lang.display}}
{{l10n_strings.AUTHOR}}
{{l10n_strings.AUTHOR_TOOLTIP_TEXT}}
{{$select. selected.display}}
selected.display}}
{{l10n_strings.CREATE_AND_ADD_TO_COLLECTION_MODAL_BUTTON}}
{{l10n_strings.CREATE_A_COLLECTION_ERROR}}
Узлы опирания наслонных стропил на прогон и мауэрлат
Наслонная система стропил может быть распорной или безраспорной конструкцией. От правильного выбора узлов опирания и сочленения стропильных ног зависит будут стропила распирать стены или не будут, нужно под них предусматривать различные мероприятия для перехвата распора или не нужно.
На расчетных схемах в узлах конструкций рисуют кружочки, означающие шарнирное соединение. Шарниры лапками соединяются с условными опорами, по которым можно визуально представить степень свободы узла.
Шарнир с двумя заделанными в опору лапками предполагает, что узел неподвижен, но балка может крутиться в шарнире, то есть узел обладает одной степенью свободы — поворотом. Шарнир с лапками, стоящими на скользящей опоре или ползуне, показывает, что узел обладает двумя степенями свободы — возможностью поворота балки и горизонтального смещения.
Шарнир с лапками, стоящими на скользящей опоре или ползуне, показывает, что узел обладает двумя степенями свободы — возможностью поворота балки и горизонтального смещения.
Три степени свободы узла позволяют горизонтальное, вертикальное смещение и поворот, такой узел рисуется просто кружочком и может быть врезан в стержень, обозначающий балку. Если узел врезан в балку, то ее называют разрезной, то есть балки, находящиеся слева и справа от шарнира, с некоторыми допущениями могут рассматриваться как отдельные элементы.
Если кружочек (шарнир) нарисован под балкой, то балка, лежащая на нем, называется неразрезной. Шарнир с тремя степенями свободы, врезанный в балку, во многих случаях, делает ее мгновенно изменяемой системой, то есть довольно неустойчивой конструкцией. Узел с нулевой степенью свободы означает жесткое защемление конца балки и запрещает ей всякие смещения: горизонтальное, вертикальное и поворот (рис. 19).
Рис. 19. Примеры схематического изображения узлов
В расчетных схемах могут применяться и другие схематические изображения узлов, но все они в обшем-то понятны, а если вдруг возникнут неясности, надо просто мысленно представить в какую сторону может «пойти» узел при приложении к нему нагрузки. Поперечные размеры балок относительно их длины малы, поэтому балки (стропила и пр.) рисуются как стержни, а нагрузка в них распределяется как бы только вдоль продольной оси элемента и расчет всей конструкции ведется для стержневой схемы.
Поперечные размеры балок относительно их длины малы, поэтому балки (стропила и пр.) рисуются как стержни, а нагрузка в них распределяется как бы только вдоль продольной оси элемента и расчет всей конструкции ведется для стержневой схемы.
Необходимо отметить, что слова: горизонтальное смещение и поворот совсем не означают, что, например, ползун — узел с двумя степенями свободы произвольно передвигается в горизонтальном направлении.
На самом деле, этот узел достаточно хорошо закреплен, но допускает возможность перемещения конца балки от нагрузки, температурных и влажностных изменений без чрезмерного развития в нем внутренних напряжений. Этот узел просто не передает распора, а поворот при изгибе балки возможен только в нормативных пределах. По настоящему ползун поползет (простите за тавтологию) только при нагрузках превышающих предельно допустимые. Слово «шарнир» тоже не нужно понимать буквально.
Да, концы балок могут соединяться болтом или настоящим специально спроектированным шарниром, но, чаще всего, это обычное гвоздевое соединение. Например, можно взять доску и приколотить ее одним концом 3-4 гвоздями, предположим, к деревянной стене. Ничто не мешает нам взять ее за другой конец и преспокойно повернуть на некоторый угол.
Например, можно взять доску и приколотить ее одним концом 3-4 гвоздями, предположим, к деревянной стене. Ничто не мешает нам взять ее за другой конец и преспокойно повернуть на некоторый угол.
В данном случае, гвоздевое крепление выступает как шарнир. Однако если количество гвоздей увеличить и расчитать их на нагрузку не допускающую среза (изгиба), то поворот становится невозможном, здесь мы получаем балку с защемленным концом, но при нагрузке превышающей расчетную, узел опять становится шарниром.
Поэтому очень важно изначально определить нагрузку под которой будет работать система. Поскольку превышение фактической нагрузки сверх расчетной, приводит к изменению схемы работы узлов и разрушению всей конструкции.Сопряжения наслонных стропил относящиеся к различным схематичным изображениям узлов представленны на рисунке 20.
Рис. 20.1. Узлы опирания стропил на прогон и мауэрлат. Шарнир с одной степенью свободы (только поворот)
Рис. 20.2. Узлы опирания стропил на прогон и мауэрлат. Ползун — шарнир с двумя степенями свободы (поворот и сдвиг)
20.2. Узлы опирания стропил на прогон и мауэрлат. Ползун — шарнир с двумя степенями свободы (поворот и сдвиг)
Рис. 20.3. Узел опирания стропил на прогон. Жесткое защемление
В зависимости от решаемой задачи при проектировании крыши узловые сочленения стропил могут быть отличными от представленных на рисунках 20. Главное, это запроектировать в узлах с двумя степенями свободы: поворот, возникающий от изгиба стропил и сдвиг в горизонтальном направлении. А в узлах с одной степенью свободы — поворот стропила. Как правило, сдвиг верха или низа стропил обеспечивают горизонтальные врубки, а ограничение сдвига — упор стропил друг в друга и/или в стыкуемый элемент: мауэрлат либо прогон.
Вероятно, что людям не связанным инженерными профессиями, но помнящим из курса школьной физики принцип разложения наклонного вектора силы на горизонтальную и вертикальную ось, трудно понять куда девается горизонтальная составляющая в нижней части стропильной ноги. Попробуем объяснить принцип безраспорной системы на примере. Все мы легко можем представить себе обычную приставную лестницу. Лестница, как лестница, ничего особенного, две жерди (тетивы) и поперечные палки–ступени.
Попробуем объяснить принцип безраспорной системы на примере. Все мы легко можем представить себе обычную приставную лестницу. Лестница, как лестница, ничего особенного, две жерди (тетивы) и поперечные палки–ступени.
Мысленно приставим такую лестницу к стене, а для чистоты эксперимента обольем пол и стену маслом. Что будет если нагрузить лестницу — залезть на нее? Лестница рухнет. В нижней и верхней опоре у нее по две степени свободы. В нижнем у нее есть поворот и горизонтальное смещение, в верхнем — поворот и вертикальное смещение.
Что нужно сделать, чтобы лестница стала устойчивой в этой облитой маслом среде и держала нагрузку — вес человека? А нужно всего-то лишить ее одной (из четырех) степени свободы: горизонтальной в нижней или вертикальной в верхней опоре. Иными словами нужно закрепить низ или верх лестницы. При закреплении верха лестницы распор от разложения наклонной силы действующей вдоль продольной оси лестницы остается вверху и действует на стену, а в низу его нет.
Если с другой стороны стены поставить такую же лестницу и нагрузить ее тем же весом, то получим распор в верхней части равный распору от первой лестницы, но направленный в противоположную сторону. Эти горизонтальные силы взаимно уничтожают друг друга. Получаем устойчивую и стабильную систему.
Мысленный эксперимент с лестницей в масле вы можете додумать сами, ставя ее в различные ситуации, например, если лестница длинная и опирается на стену сверху тетивами с горизонтальными запилами или без запилов. Как она будет себя вести?
Это довольно интересно произвести такой мозговой штурм, помогающий в понимании работы наслонных стропил с различными способами опирания, при котором совсем не обязательно представлять себе вектора сил и степени свободы узлов, а просто спрогнозировать покатится лестница по горизонтальной плоскости или останется неподвижной ввиду осутствия в нижней части горизонтальной составляющей силы.
Рассмотрим плоские рамы — Студопедия
Рама это конструкция, составленная из жестко соединенных стержней. Она должна иметь три связи. Этими связями являются либо заделка, либо две шарнирные опоры: неподвижный шарнир и подвижный шарнир. В этой последней раме надо, прежде всего, определить реакции опор. Первым из уравнений статики (равновесия) следует записать сумму проекций на ось, в направлении которой действует одно неизвестное и его определить.
Она должна иметь три связи. Этими связями являются либо заделка, либо две шарнирные опоры: неподвижный шарнир и подвижный шарнир. В этой последней раме надо, прежде всего, определить реакции опор. Первым из уравнений статики (равновесия) следует записать сумму проекций на ось, в направлении которой действует одно неизвестное и его определить.
Затем из суммы моментов относительно одной из опор определить вторую реакцию.
Третью реакцию находим из суммы проекций на другую ось.
Определив реакции, изобразить раму без опор, заменив их найденными реакциями. Теперь мы имеем раму с двумя свободными концами. Идя от любого свободного конца, строим эпюру изгибающих моментов. Эпюру поперечных сил в рамах не строим.
Идя от любого свободного конца, вычисляем ординаты в конце участка. Каждая ордината уравновешивает момент, который создают относительно этого сечения все силовые факторы (силы и моменты), приложенные к части рамы от свободного конца до данного сечения.
В углах выполняется правило «с чемпришел, с тем ушел». Это условие равновесия угла, оно означает: какой момент был в конце предыдущего участка, такой же и с той же стороны должен быть в начале следующего участка. Если же в углу приложена нагрузка в виде момента, то эпюре получится скачок на величину этого момента.
На свободных и шарнирно закрепленных концах рамы, как всегда, изгибающий момент должен быть равен нулю кроме случая, когда к этому концу приложена нагрузка в виде момента. В последнем случае эпюра начинается с ординаты, равной этому моменту.
По-прежнему на участке с распределенной нагрузкой эпюра это парабола выпуклостью навстречу силе, под моментом — скачок на величину момента, под силой – излом, острием навстречу силе.
Если в одном узле сходятся несколько стержней, то идем к этому узлу от всех свободных концов, а затем проверяем равновесие узла.
Каждый врезанный шарнир снимает столько связей, сколько в нем сходится стержней минус один. Если в раме имеется врезанный шарнир, то опоры должны обеспечить должное количество связей: число реакций минус число связей, снятых врезанными шарнирами, должно равняться трем. Для построения эпюры в раме с врезанным шарниром следует определить реакции опор и реакции во врезанном шарнире. Для этого отбрасываем опоры и расчленяем раму по врезанному шарниру. Прикладываем в месте разреза взаимные силы (вертикальные и горизонтальные) — по две к каждой стороне разреза. Из уравнений статики находим реакции опор и усилия в шарнирах. Если к шарниру приложена сила (или момент), то, разрезая по шарниру, можно разделить приложенный силовой фактор в любом соотношении: либо целиком отнести его к одной части, либо разделить пополам или в любом ином соотношении.
Если в раме имеется врезанный шарнир, то опоры должны обеспечить должное количество связей: число реакций минус число связей, снятых врезанными шарнирами, должно равняться трем. Для построения эпюры в раме с врезанным шарниром следует определить реакции опор и реакции во врезанном шарнире. Для этого отбрасываем опоры и расчленяем раму по врезанному шарниру. Прикладываем в месте разреза взаимные силы (вертикальные и горизонтальные) — по две к каждой стороне разреза. Из уравнений статики находим реакции опор и усилия в шарнирах. Если к шарниру приложена сила (или момент), то, разрезая по шарниру, можно разделить приложенный силовой фактор в любом соотношении: либо целиком отнести его к одной части, либо разделить пополам или в любом ином соотношении.
10 лучших способов сделать прототип петли живым
В стиле Дэвида Леттермана мы представляем вам:
10 лучших способов сделать прототип живой петли
10. Вырежьте функциональную «живую» часть петли из существующего серийного изделия и с помощью очень маленьких саморезов прикрепите вырезанную часть петли к вашей изготовленной модели.
9. Используя очень маленькие саморезы, приклейте тонкий кусок полипропилена к месту, где будет находиться живая петля.Материал не будет гнуться, как формованная живая петля, но вы получите представление о том, как он будет работать.
8. Изготовьте или распечатайте свой прототип и сделайте из него резиновую форму. Вырежьте функциональную подвижную часть петли из существующего производственного продукта. Вставьте эту подвижную часть петли в резиновую форму и отлейте уретан в форму, встраивая подвижную часть петли в модель в качестве неотъемлемой части и надейтесь, что она останется встроенной для нескольких изгибов.
7. Изготовьте или распечатайте свой прототип и сделайте из него резиновую форму.Вставьте кусок ткани в место петли. Затем отлейте деталь в уретан с низкой твердостью, заделав ткань. Петля будет очень слабой и неряшливой, но при этом она не будет подвергаться нагрузке.
6. Изготовьте или распечатайте свой прототип и сделайте из него резиновую форму. Отлить деталь в уретан с низким твердостью в надежде, что область шарнира будет достаточно гибкой, чтобы несколько раз согнуться, но более толстые стенки по-прежнему достаточно жесткие, чтобы функционировать.
Отлить деталь в уретан с низким твердостью в надежде, что область шарнира будет достаточно гибкой, чтобы несколько раз согнуться, но более толстые стенки по-прежнему достаточно жесткие, чтобы функционировать.
5. Изготовьте или распечатайте свой прототип, и если боковые стенки достаточно толстые, вы можете просверлить в них небольшие отверстия и отлить материал с низким твердостью там, где будет живая петля, и надеяться, что вы получите несколько изгибов раньше материалы раздельные.
4. Распечатайте прототип на полужестком материале для быстрого прототипирования, и вы получите несколько изгибов, прежде чем он сломается, что, надеюсь, даст вам достаточно информации, чтобы справиться. Это также недорого, поэтому распечатать несколько экземпляров не будет слишком дорого.
3. Напечатайте деталь из гибкого материала для быстрого создания прототипа и надейтесь, что шарнирная область выдержит еще несколько изгибов, чем полужесткий материал. Надеюсь, остальная часть вашей модели будет пригодна для использования с мягкими боковинами.
2. Используйте прочную промышленную ленту для соединения частей, которые должны быть соединены живым шарниром. Петля — это не то же самое, что полипропилен, но она будет работать как петля, и это, безусловно, недорогой метод, который можно легко отремонтировать. Известно, что творческие механизмы используют это, когда лучший метод недоступен.
И номер один для производства модели петель из полипропилена:
1. Обработайте прототип непосредственно из полипропилена на станке с ЧПУ.Вам, наверное, сказали, что это невозможно. Люди, вероятно, говорили, что полипропилен не поддается механической обработке, потому что он слишком мягкий и слишком легко плавится от тепла резака. Или что он не режет чисто, имеет заусенцы и очень шероховатую поверхность.
Что ж, это можно сделать, и нет лучшего способа создать прототип живого шарнира, чем произвести его непосредственно из материала, из которого он будет изготовлен. Вы получаете модель, которая будет работать бесконечно — точно так же, как изготовленная деталь. Он будет иметь такое же ощущение и ту же функцию, что и формованная деталь. Поверхность не будет иметь гладкого глянца, как у формованных деталей, но она будет чистой и презентабельной.
Он будет иметь такое же ощущение и ту же функцию, что и формованная деталь. Поверхность не будет иметь гладкого глянца, как у формованных деталей, но она будет чистой и презентабельной.
Creative Mechanisms специализируется на обработке подвижных навесных моделей из полипропилена. Позвольте нам показать вам преимущества обработанного прототипа.
10. Вырежьте функциональную «живую» часть петли из существующего серийного изделия и с помощью очень маленьких саморезов прикрепите вырезанную часть петли к вашей изготовленной модели.9. Используя крошечные саморезы, приклейте тонкий кусок полипропилена к месту, где будет находиться живая петля. Материал не будет гнуться, как формованная живая петля, но вы получите представление о том, как он будет работать. 8. Изготовьте или распечатайте свой прототип и сделайте из него резиновую форму. Вырежьте функциональную подвижную часть петли из существующего производственного продукта. Вставьте эту подвижную часть петли в резиновую форму и отлейте уретан в форму, встраивая подвижную часть петли в модель в качестве неотъемлемой части и надейтесь, что она останется встроенной для нескольких изгибов. 7. Изготовьте или распечатайте свой прототип и сделайте из него резиновую форму. Вставьте кусок ткани в место петли. Затем отлейте деталь в уретан с низкой твердостью, заделав ткань. Петля будет очень слабой и неряшливой, но при этом она не будет подвергаться нагрузке. 6. Изготовьте или распечатайте свой прототип и сделайте из него резиновую форму. Отлить деталь в уретан с низким твердостью в надежде, что область шарнира будет достаточно гибкой, чтобы несколько раз согнуться, но более толстые стенки по-прежнему достаточно жесткие, чтобы функционировать.5. Изготовьте или распечатайте свой прототип, и если боковые стенки достаточно толстые, вы можете просверлить в них несколько небольших отверстий и отлить из материала с низким твердостью там, где будет живой шарнир, и надеяться, что вы получите несколько изгибов до того, как материалы раздельные. 4. Распечатайте прототип на полужестком материале для быстрого прототипирования, и вы получите несколько изгибов, прежде чем он сломается, что, надеюсь, даст вам достаточно информации, чтобы справиться.
7. Изготовьте или распечатайте свой прототип и сделайте из него резиновую форму. Вставьте кусок ткани в место петли. Затем отлейте деталь в уретан с низкой твердостью, заделав ткань. Петля будет очень слабой и неряшливой, но при этом она не будет подвергаться нагрузке. 6. Изготовьте или распечатайте свой прототип и сделайте из него резиновую форму. Отлить деталь в уретан с низким твердостью в надежде, что область шарнира будет достаточно гибкой, чтобы несколько раз согнуться, но более толстые стенки по-прежнему достаточно жесткие, чтобы функционировать.5. Изготовьте или распечатайте свой прототип, и если боковые стенки достаточно толстые, вы можете просверлить в них несколько небольших отверстий и отлить из материала с низким твердостью там, где будет живой шарнир, и надеяться, что вы получите несколько изгибов до того, как материалы раздельные. 4. Распечатайте прототип на полужестком материале для быстрого прототипирования, и вы получите несколько изгибов, прежде чем он сломается, что, надеюсь, даст вам достаточно информации, чтобы справиться. Это также недорого, поэтому распечатать несколько экземпляров не будет слишком дорого.3. Распечатайте деталь из гибкого материала для быстрого создания прототипа и надейтесь, что область шарнира выдержит еще несколько изгибов, чем полужесткий материал. Надеюсь, остальная часть вашей модели будет пригодна для использования с мягкими боковинами. 2. Используйте прочную промышленную ленту для соединения частей, которые должны быть соединены живым шарниром. Петля — это не то же самое, что полипропилен, но она будет работать как петля, и это, безусловно, недорогой метод, который можно легко отремонтировать. Известно, что творческие механизмы используют это, когда лучший метод недоступен.И способ номер один для производства модели живой петли из полипропилена: 1. Обработка прототипа непосредственно из полипропиленового материала на станке с ЧПУ. Вам, наверное, сказали, что это невозможно. Люди, вероятно, говорили, что полипропилен не поддается механической обработке, потому что он слишком мягкий и слишком легко плавится от тепла резака.
Это также недорого, поэтому распечатать несколько экземпляров не будет слишком дорого.3. Распечатайте деталь из гибкого материала для быстрого создания прототипа и надейтесь, что область шарнира выдержит еще несколько изгибов, чем полужесткий материал. Надеюсь, остальная часть вашей модели будет пригодна для использования с мягкими боковинами. 2. Используйте прочную промышленную ленту для соединения частей, которые должны быть соединены живым шарниром. Петля — это не то же самое, что полипропилен, но она будет работать как петля, и это, безусловно, недорогой метод, который можно легко отремонтировать. Известно, что творческие механизмы используют это, когда лучший метод недоступен.И способ номер один для производства модели живой петли из полипропилена: 1. Обработка прототипа непосредственно из полипропиленового материала на станке с ЧПУ. Вам, наверное, сказали, что это невозможно. Люди, вероятно, говорили, что полипропилен не поддается механической обработке, потому что он слишком мягкий и слишком легко плавится от тепла резака. Или что он не режет чисто, имеет заусенцы и очень шероховатую поверхность. Что ж, это можно сделать, и нет лучшего способа создать прототип живого шарнира, чем произвести его непосредственно из материала, из которого он будет изготовлен.Вы получаете модель, которая будет работать бесконечно — точно так же, как изготовленная деталь. Он будет иметь такое же ощущение и ту же функцию, что и формованная деталь. Поверхность не будет иметь гладкого глянца, как у формованных деталей, но она будет чистой и презентабельной. Компания Creative Mechanisms специализируется на обработке навесных моделей из полипропилена. Позвольте нам показать вам преимущества обработанного прототипа.
Или что он не режет чисто, имеет заусенцы и очень шероховатую поверхность. Что ж, это можно сделать, и нет лучшего способа создать прототип живого шарнира, чем произвести его непосредственно из материала, из которого он будет изготовлен.Вы получаете модель, которая будет работать бесконечно — точно так же, как изготовленная деталь. Он будет иметь такое же ощущение и ту же функцию, что и формованная деталь. Поверхность не будет иметь гладкого глянца, как у формованных деталей, но она будет чистой и презентабельной. Компания Creative Mechanisms специализируется на обработке навесных моделей из полипропилена. Позвольте нам показать вам преимущества обработанного прототипа.
Настройки
§
1
2
3
4
5
6
7
8
9
0
–
=
Backspace
Вкладка
кв
Вт
e
r
т
л
u
и
или
п.
[
]
капслок
а
с
д
f
г
ч
j
к
л
;
‘
\
смена
`
z
х
с
v
б
№
м
,
.
/
смена
alt
alt
Многочисленные применения алюминиевых петель
Алюминиевые петли играют жизненно важную роль во всех нишах нашего общества. Они легкие и прочные, что делает их первыми кандидатами для применения в аэрокосмической и транспортной сферах; в коммерческом и военном отношении. Алюминиевые петли также устойчивы к коррозии, что делает их идеальными для использования на море, в пищевых продуктах и на открытом воздухе или в любых приложениях, где нержавеющая сталь может быть не самым идеальным вариантом с точки зрения функции или стоимости.
 youtube.com/embed/u_0RK8GHJjc?rel=0″ frameborder=»0″ allow=»accelerometer; autoplay; encrypted-media; gyroscope; picture-in-picture» allowfullscreen=»»/>
youtube.com/embed/u_0RK8GHJjc?rel=0″ frameborder=»0″ allow=»accelerometer; autoplay; encrypted-media; gyroscope; picture-in-picture» allowfullscreen=»»/>
Вот еще немного информации о неоценимой роли алюминиевых петель в повседневной жизни.
Морская среда
В морской среде востребованы алюминиевые петли. Лодочники ожидают, что движущиеся компоненты на палубе, в люке, на камбузе или в каюте лодки будут работать без сбоев; И они это делают благодаря алюминиевым петлям, устойчивым к коррозии и влажности. Например, алюминиевые петли для пианино используются в качестве мобильных креплений для шарнирных узлов лодки, включая крышки, двери, шкафы и люки.Смещенные алюминиевые петли используются в сиденьях на понтонной скамье, чтобы подушка сиденья поднималась и опускалась, чтобы получить доступ к отсеку для хранения вещей внизу.
Пожарная среда
Специальные огнестойкие петли встраиваются в двери и окна больниц, школ, офисов, аэропортов, стадионов, промышленных зданий и т. Д. Огнестойкие алюминиевые петли анодированы — анодированный алюминий является результатом так называемого процесса «электролитической пассивации», который увеличивает толщину естественного оксидного слоя на поверхности металла.Анодирование увеличивает стойкость к коррозии и износу и обеспечивает улучшенную адгезию для краски, грунтовок и клеев.
Д. Огнестойкие алюминиевые петли анодированы — анодированный алюминий является результатом так называемого процесса «электролитической пассивации», который увеличивает толщину естественного оксидного слоя на поверхности металла.Анодирование увеличивает стойкость к коррозии и износу и обеспечивает улучшенную адгезию для краски, грунтовок и клеев.
Сверхпрочные огнестойкие сплошные алюминиевые петли, которые обладают огнестойкостью до 3 часов для металлических дверей, относятся к классу А по огнестойкости. В этих специализированных петлях используются автоматические штифты из нержавеющей стали, активируемые при нагревании. Петли, которые обладают огнестойкостью до 3 часов, были признаны и одобрены стандартами, установленными Underwriters ’Laboratories, Inc.или другая утвержденная лаборатория.
Больничные помещения
Алюминиевые неразрезные петли со встроенными защитными краями обеспечивают превосходную защиту края дверных петель; и исключительно подходят для дверей больниц, которые шире, тяжелее и / или подвержены сильному удару от носилок или другого оборудования.
Однако можно выйти за рамки одних лишь дверей, поскольку алюминиевые петли встроены в койки пациентов, медицинское оборудование и портативные компьютерные станции медсестер.Но как насчет чего-нибудь действительно крутого, как бионические коленные скобы с алюминиевыми петлями? Здесь особенно подходят алюминиевые петли, поскольку они по своей природе легкие.
Бионические наколенники используются спортсменами для тренировок и профилактики травм, а также стационарными и амбулаторными пациентами. Бионические коленные ортезы помогают при восстановлении после травм, нестабильности суставов, умеренных растяжениях связок и сухожилий, гиперразгибании и поддержке надколенника. Петли на самом деле тренируют тело, чтобы удерживать колено или колени с фиксатором вне зоны риска.Компактные подпружиненные алюминиевые петли позволяют пользователю не только передвигаться, как обычно, но и подниматься по лестнице и даже поднимать тяжелые предметы. Это удобство особенно важно, если скалолазание или подъем тяжестей являются частью занятий или образа жизни человека. В бионических коленных ортезах волшебство происходит, когда встроенные шарниры одновременно минимизируют сжатие суставов благодаря встроенной системе амортизации.
Это удобство особенно важно, если скалолазание или подъем тяжестей являются частью занятий или образа жизни человека. В бионических коленных ортезах волшебство происходит, когда встроенные шарниры одновременно минимизируют сжатие суставов благодаря встроенной системе амортизации.
Алюминиевые петли — невоспетые герои
Независимо от того, используются ли алюминиевые петли для дверей, ворот, шкафов, крышек и т. Д. — используются ли алюминиевые петли для промышленных, коммерческих или жилых нужд — и используются ли алюминиевые петли в помещении или на открытом воздухе, эти удивительные устройства гармонично сочетаются с окружающей средой во время исполнения. плавные и плавные действия.Они помогают бесчисленному количеству людей каждый день, делая их жизнь намного проще!
Drillpro угловое долото долото по дереву для врезания петель в квадратные петли деревообрабатывающий инструмент для резьбы Продажа
Способы доставки
Общее примерное время, необходимое для получения вашего заказа, показано ниже:
- Вы оформили заказ
- (Время обработки)
- Отправляем Ваш заказ
- (время доставки)
- Доставка!
Общее расчетное время доставки
Общее время доставки рассчитывается с момента размещения заказа до момента его доставки вам.-03.jpg) Общее время доставки делится на время обработки и время доставки.
Общее время доставки делится на время обработки и время доставки.
Время обработки: Время, необходимое для подготовки вашего товара (ов) к отправке с нашего склада. Это включает в себя подготовку ваших товаров, выполнение проверки качества и упаковку для отправки.
Время доставки: Время, в течение которого ваш товар (-ы) дойдет с нашего склада до места назначения.
Рекомендуемые способы доставки для вашей страны / региона приведены ниже:
Отправить по адресу:
Корабль из
Этот склад не может быть доставлен к вам.
| Способ (ы) доставки | Срок доставки | Информация для отслеживания |
|---|
Примечание:
(1) Вышеупомянутое время доставки относится к расчетному времени в рабочих днях, которое займет отгрузка после отправки заказа.
(2) Рабочие дни не включают субботу / воскресенье и праздничные дни.
(3) Эти оценки основаны на нормальных обстоятельствах и не являются гарантией сроков доставки.
(4) Мы не несем ответственности за сбои или задержки в доставке в результате любых форс-мажорных обстоятельств, таких как стихийное бедствие, плохая погода, война, таможенные проблемы и любые другие события, находящиеся вне нашего прямого контроля.
(5) Ускоренная доставка не может быть использована для почтовых ящиков
Расчетные налоги: Может взиматься налог на товары и услуги (GST).
Способы оплаты
Мы поддерживаем следующие способы оплаты.Нажмите, чтобы получить дополнительную информацию, если вы не знаете, как платить.
* В настоящее время мы предлагаем оплату наложенным платежом для Саудовской Аравии, Объединенных Арабских Эмиратов, Кувейта, Омана, Бахрейна, Катара, Таиланда, Сингапура, Малайзии, Филиппин, Индонезии, Вьетнама, Индии. Мы отправим на ваш мобильный телефон код подтверждения, чтобы проверить правильность ваших контактных данных. Убедитесь, что вы следуете всем инструкциям, содержащимся в сообщении.
Мы отправим на ваш мобильный телефон код подтверждения, чтобы проверить правильность ваших контактных данных. Убедитесь, что вы следуете всем инструкциям, содержащимся в сообщении.
* Оплата в рассрочку (кредитная карта) или Boleto Bancário доступна только для заказов с адресами доставки в Бразилии.
Неупругое поведение железобетонной консольной балки с закладной стальной фермой в изгибающемся пластиковом шарнире при циклической нагрузке
MATEC Web of Conferences 258 , 04007 (2019)
Неупругое поведение железобетонной консольной балки со встроенной стальной фермой в изгибающемся пластиковом шарнире при циклической нагрузке
Фатмавати Амир 1 , 2 * , Иман Сатьярно 1 * и Джоко Сулистио 1
1 Кафедра гражданской и экологической инженерии, Инженерный факультет, Университет Гаджах Мада, 55284 Джокьякарта, Индонезия
2 Кафедра гражданского строительства, Инженерный факультет, Университет Тадулако, 94118 Палу, Индонезия
* Автор, ответственный за переписку: fatmastructureuntad @ gmail. com; [email protected]
com; [email protected]
Аннотация
Ожидается, что конструкции будут иметь пластичное поведение при сильных землетрясениях. Одно из требований для достижения такого пластичного поведения — отсутствие разрушения элементов конструкции при сдвиге. В этой статье обсуждается новый метод использования встроенной стальной фермы в изгибаемых пластиковых шарнирах балки, чтобы избежать разрушения при сдвиге. Как уже известно, прочность на сдвиг, обеспечиваемая бетоном, будет уменьшаться, когда в элементе разовьется пластичность изгибных пластиковых шарниров.Таким образом, консервативная процедура, игнорирующая роль бетона в изгибных пластиковых петлях в сопротивлении требованию сдвига, принята некоторыми правилами. Это увеличит потребность в усилении сдвига, обеспечиваемом скобами или поперечным усилением в пластмассовом шарнире; тем не менее, это еще не гарантирует, что разрушение при сдвиге не произойдет. Из результатов лабораторных испытаний при циклическом нагружении в этом исследовании можно отметить, что балка с заделанной стальной фермой в пластиковом шарнире имеет лучшее гистерезисное поведение, чем балка без заделанной стальной фермы. Оценка результата испытаний также показывает, что прочность балки с заделанной стальной фермой в пластмассовом шарнире не снижается с увеличением амплитуды сноса с 1,4 до 3,5. Кроме того, прочность балки без встроенной стальной фермы в пластмассовый шарнир снижается с увеличением амплитуды сноса после достижения 2,5.
Оценка результата испытаний также показывает, что прочность балки с заделанной стальной фермой в пластмассовом шарнире не снижается с увеличением амплитуды сноса с 1,4 до 3,5. Кроме того, прочность балки без встроенной стальной фермы в пластмассовый шарнир снижается с увеличением амплитуды сноса после достижения 2,5.
© Авторы, опубликовано EDP Sciences, 2019
Это статья в открытом доступе, распространяемая в соответствии с условиями лицензии Creative Commons Attribution License 4.0, который разрешает неограниченное использование, распространение и воспроизведение на любом носителе при условии правильного цитирования оригинальной работы.
Угловой квадратный долото Врезной шарнир дверной замок Канавка Деревообрабатывающий инструмент — серебро
Этот продукт продается сторонним продавцом на торговой площадке.
В случае претензий по гарантии на этот продукт распространяется гарантия
Kogan.
Гарантия Когана
Гарантия Когана обещает это для всех без исключения заказов на Коган. com, вы получите то, что заказали, и все будет в соответствии с описанием. В противном случае мы:
com, вы получите то, что заказали, и все будет в соответствии с описанием. В противном случае мы:
- Убедимся, что вы получили заказанный продукт, или, если мы не сможем этого сделать,
- Вернем вам уплаченную сумму.
Как это работает?
Если вы не получите заказанные продукты или они не соответствуют описанию, мы решим эту проблему за вас. Простые шаги:
- Войдите в свою учетную запись Kogan.com, в которой был сделан заказ.
- Перейдите в историю заказов и выберите заказ, с которым вам нужна помощь.
- Выберите « Свяжитесь с Kogan » или для продуктов, продаваемых Kogan.com, или для Продавца на торговой площадке выберите « Связаться с продавцом », заполните форму и прикрепите любую соответствующую информацию
Что касается товаров, продаваемых Kogan, мы позаботимся об этом и свяжемся с вами в течение 48 часов.
Для продуктов, продаваемых Продавцом на торговой площадке, если Продавец не предоставил удовлетворительное решение в течение 3 рабочих дней, отправьте здесь запрос на разрешение спора, и мы позаботимся об этом оттуда в соответствии с настоящей Гарантией.
Неисправности или проблемы позже?
Если с вашим продуктом все было в порядке, когда вы его получили, но позже возникла проблема, вы также можете связаться с Kogan или продавцом, выполнив указанные выше действия.
Что касается продуктов, продаваемых Kogan, мы свяжемся с вами в течение 48 часов и решим проблему в соответствии с Уставом клиента Kogan.
Для продуктов, продаваемых Продавцом на Торговой площадке, если Продавец не предоставил удовлетворительное решение в течение 3 дней, отправьте здесь запрос на разрешение спора, и он позаботится об этом оттуда, применяя стандарты Устава клиентов Kogan.
Нужна дополнительная помощь?
Посетите Справочный центр, чтобы узнать о некоторых из часто задаваемых вопросов или ознакомиться со всеми условиями и положениями здесь.
Если у вас есть другие вопросы, свяжитесь с нашей службой поддержки клиентов здесь.
Логан Ури разбивает это на науку: Life Kit: NPR
Люсинда Шрайбер для NPR
Люсинда Шрайбер для NPR
Свидания во время пандемии — это не прогулка по парку.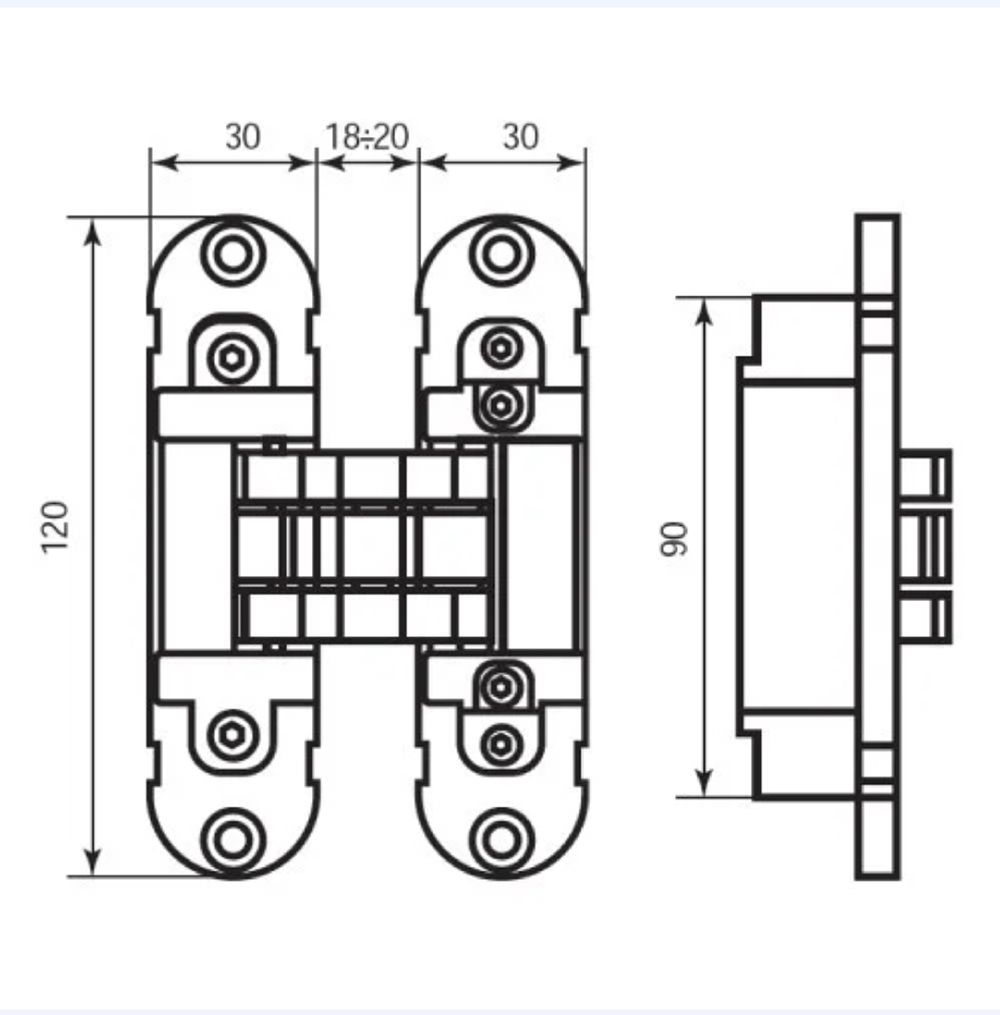 На самом деле, часто это буквально прогулка по парку, но это не значит, что это просто. За более чем 15 лет работы тренером по свиданиям люди приходили ко мне в состоянии паники из-за того, что их момент, чтобы найти совпадение, возможно, уже прошел.
На самом деле, часто это буквально прогулка по парку, но это не значит, что это просто. За более чем 15 лет работы тренером по свиданиям люди приходили ко мне в состоянии паники из-за того, что их момент, чтобы найти совпадение, возможно, уже прошел.
Я всегда пытаюсь донести до своих клиентов, что свидания — это приобретенный навык, с пошаговым процессом, и если вы будете следовать плану, вы встретите своего будущего партнера. У Логан Ури есть план, и он знакомит читателей с каждым этапом этого процесса в своей новой книге « Как не умереть в одиночестве».
Ури не только занимается поведенческими исследованиями в приложении для знакомств Hinge, но и имеет более чем десятилетний опыт изучения человеческого поведения в различных технологических компаниях, включая Google.
В своей книге Ури делит разочарованных свиданий на три основные категории, каждая из которых сталкивается с уникальными проблемами.
- Романтик: Если вы увлечены сказкой о том, как вы хотите, чтобы ваша история любви развивалась, это можете быть вы.
- Максимайзер: Если вы заядлый фанат с контрольным списком качеств для следующего лучшего совпадения, вы попадаете в эту категорию.
- The Hesitator: Если у вас есть проблемы с началом свиданий или у вас есть миллион причин, почему сейчас не время для поиска любви, это определенно вы.
В своей книге Ури излагает восемь вопросов, которые должны задать свидания после встречи с кем-то.Она говорит, что эти вопросы могут помочь людям понять, как они себя чувствуют после свидания, и держаться подальше от менталитета свиданий, основанного на «контрольном списке».
- Какую сторону меня они выявили?
- Как мое тело чувствовало себя во время свидания? Жесткий, расслабленный или что-то среднее?
- Чувствую ли я себя более возбужденным или обесточенным, чем до даты ?
- Мне что-то в них интересно?
- Они меня рассмешили?
- Чувствовал ли я себя услышанным?
- Чувствовал ли я себя привлекательным в их присутствии?
- Чувствовал ли я себя очарованным, скучающим или что-то среднее?
У каждого из этих типов есть уникальные проблемы и рекомендации, но некоторые советы Логана универсальны, независимо от вашего стиля свиданий. Вот три вещи, которые вы можете сделать сегодня, чтобы навсегда изменить свою личную жизнь:
Вот три вещи, которые вы можете сделать сегодня, чтобы навсегда изменить свою личную жизнь:
- Развивайте установку на рост : если вы посмотрите на свидания как на набор приобретенных навыков и увидите процесс как возможность обучения, вы будете меньше стресса о каждом индивидуальном взаимодействии.
- Создайте ритуал перед свиданием: Выясните, что вызывает у вас хорошее настроение при свидании. Может быть, это конкретный плейлист или одежда, которую вы любите носить, или, возможно, это призыв к лучшему другу, чтобы поднять вас.Убедитесь, что вы вводите каждую дату с оптимизмом и возможностью.
- К черту искру: На самом деле это одна из глав в Как не умереть в одиночестве. Погоня за искрой, основанной только на первоначальной химии, — это проигрышная битва — и я тоже был свидетелем этого среди моих клиентов и слушателей подкастов. Вместо того, чтобы отдавать предпочтение бабочкам, ищите более глубокие элементы связи и окно в значения вашей даты.
 Пойдите на это второе свидание и посмотрите, что развернется.
Пойдите на это второе свидание и посмотрите, что развернется.
 Пойдите на это второе свидание и посмотрите, что развернется.
Пойдите на это второе свидание и посмотрите, что развернется.Понимание подводных камней в свиданиях и разработка стратегии могут помочь вам наладить отношения, которые вы хотите. Возможно, это не тот пакет, который вы себе представляете, но глубокая связь и отношения, которые могут расцвести с течением времени, стоят более миллиона тупиковых свиданий.
Дамона Хоффман — сертифицированный тренер по знакомствам и ведущая подкаста The Dates & Mates .
Подкаст-версия этой истории была подготовлена Меган Кин.
Мы будем рады услышать от вас. Оставьте нам голосовое сообщение по телефону 202-216-9823 или напишите нам по адресу [email protected] .
Чтобы получить больше Life Kit, подпишитесь на нашу рассылку новостей .
10A-120SA-33 — Петля с постоянным крутящим моментом, симметрическая SOUTHCO
Шарнир с постоянным крутящим моментом, симметричный, крутящий момент в прямом направлении 1. 36 Нм (12 дюйм-фунт-сила), обратный момент 1,36 Н-м (12 дюйм-фунт-сила), заклепка / винт (сквозное отверстие), цинковый сплав, натуральный
36 Нм (12 дюйм-фунт-сила), обратный момент 1,36 Н-м (12 дюйм-фунт-сила), заклепка / винт (сквозное отверстие), цинковый сплав, натуральный
Распродано
Требуется цитата
Установка
Класс
.